
 Исследователи разрабатывают инновационного насекомоподобного робота с выдвижными лапками. Он сможет исследовать сложную местность пещер и лавовых трубок на Луне и даже на Марсе.
Исследователи разрабатывают инновационного насекомоподобного робота с выдвижными лапками. Он сможет исследовать сложную местность пещер и лавовых трубок на Луне и даже на Марсе.
[Марк Каткоски, профессор в сфере машиностроения]: «Это очень интересные места для исследования. Они относительно закрыты. Если есть какие-либо признаки прошлой жизни, это хорошие места для их поиска. Кроме того, если мы в конечном итоге думаем о человеческом жилье, это хорошее место для строительства убежища».
Марсианские пещеры – заманчивая цель будущих исследований Красной планеты. У людей пока нет определённого представления об их структуре. Робот ReachBot, созданный Стэнфордским университетом, предназначен для адаптации к любой пещерной структуре, в которой может оказаться.
[Марко Павоне, доцент кафедры аэронавтики и астронавтики]: «Цель ReachBot – разработать робота, который сможет получить доступ к экстремальным условиям на других планетах, таких как Марс или Луна, куда обычно роботы не могут попасть».
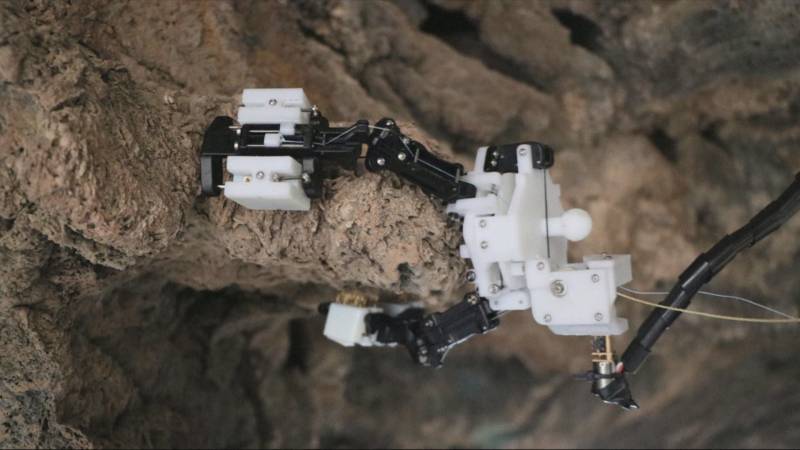
ReachBot создан по аналогии с тем, как перемещаются паукообразные с небольшим телом и длинными лапами. Его захваты могут фиксироваться на каменистых поверхностях, позволяя роботу эффективно перемещаться в сложных условиях.
[Тони Чэнь, разработчик]: «Для создания прототипа ReachBot мы фактически использовали множество рулеток, потому что их функционал почти идентичен космическим захватам».
Ползающий по пещерам ReachBot оснащён датчиками и сканером окружающей среды. Это позволяет ему определять доступные для захвата объекты на каменистых поверхностях.
[Марко Павоне, доцент кафедры аэронавтики и астронавтики]: «Робот должен проанализировать все возможности и все неопределенности, чтобы вычислить эффективный и безопасный путь. Для этого используют различные методы, включая искусственный интеллект».
Эффективность ReachBot проверили в пустыне Мохаве в Калифорнии. Учёные говорят, что будут и дальше его совершенствовать. При этом в космосе у него будет множество применений: от исследования планет, до миссий на астероиды и спутники.